Concept Overview
3. Обзор концепта (общая идея)
BWB-Jet R4X в двух словах: это реактивный самолёт-лаборатория, внешне напоминающий “летающее крыло” с утолщённым корпусом, способный взлетать и садиться на коротких полосах за счёт огромной несущей площади и отклоняемой тяги четырёх двигателей. Концепт сочетает в себе аэродинамическую эффективность бесхвостого компоновочного решения и активное управление вектором тяги, подобно тому как квадрокоптеры обеспечивают устойчивость за счёт изменения тяги винтов.
Ключевые особенности R4X
Ниже выделены основные смысловые блоки, которые помогают быстро пройтись по концепту и использовать ToC как инструмент навигации.
Единый несущий корпус
В отличие от схемы “фюзеляж-труба + отдельное крыло”, здесь центрфюзеляж плавно переходит в крылья, образуя единую несущую поверхность большой площади. Весь корпус генерирует подъёмную силу, что повышает аэродинамическую эффективность на крейсерском режиме и особенно полезно на малых скоростях.
Увеличенный внутренний объём
Широкий толстый корпус обеспечивает чрезвычайно большой внутренний объём для полезной нагрузки. По требованию проекта центральная часть по ширине примерно в 2 раза больше базовой модели, что при сопоставимой длине и высоте даёт приблизительно двукратное увеличение объёма (плюс дополнительно увеличена толщина корпуса, чтобы суммарно достичь ≈3-кратной вместимости). Такой объём можно использовать либо для размещения пассажиров (в гипотетической пассажирской версии ≈900 мест против ≈300 у A350), либо для топлива/оборудования и пр. В рамках исследовательской задачи, большой объём даёт свободу в компоновке оборудования и балласта для центровки.
Массо-габаритный класс A350
Габаритные размеры R4X близки к Airbus A350-900: длина порядка 60-66 м, размах крыла около 65-70 м (но существенно более широкая хорда). Для ориентира: у A350-900 длина 66.9 м, размах 64.8 м[3]. R4X несколько короче и шире - приблизительные размеры: длина ≈60 м, размах ≈70 м. Площадь несущей поверхности при этом огромна - оценочно ≈1100-1200 м² (против 443 м² у A350[3]). Такая огромная площадь необходима для обеспечения малого удельного давления на крыло (ниской нагрузки на крыло) и, как следствие, малой скорости сваливания (см. раздел 11). Удлинение крыла (aspect ratio) у несущего корпуса будет ниже обычного - порядка 4-5 (вместо ≈9.5 у A350[8]), но индуктивное сопротивление компенсируется общей площадью (см. раздел 11 и 14).
Четыре реактивных двигателя
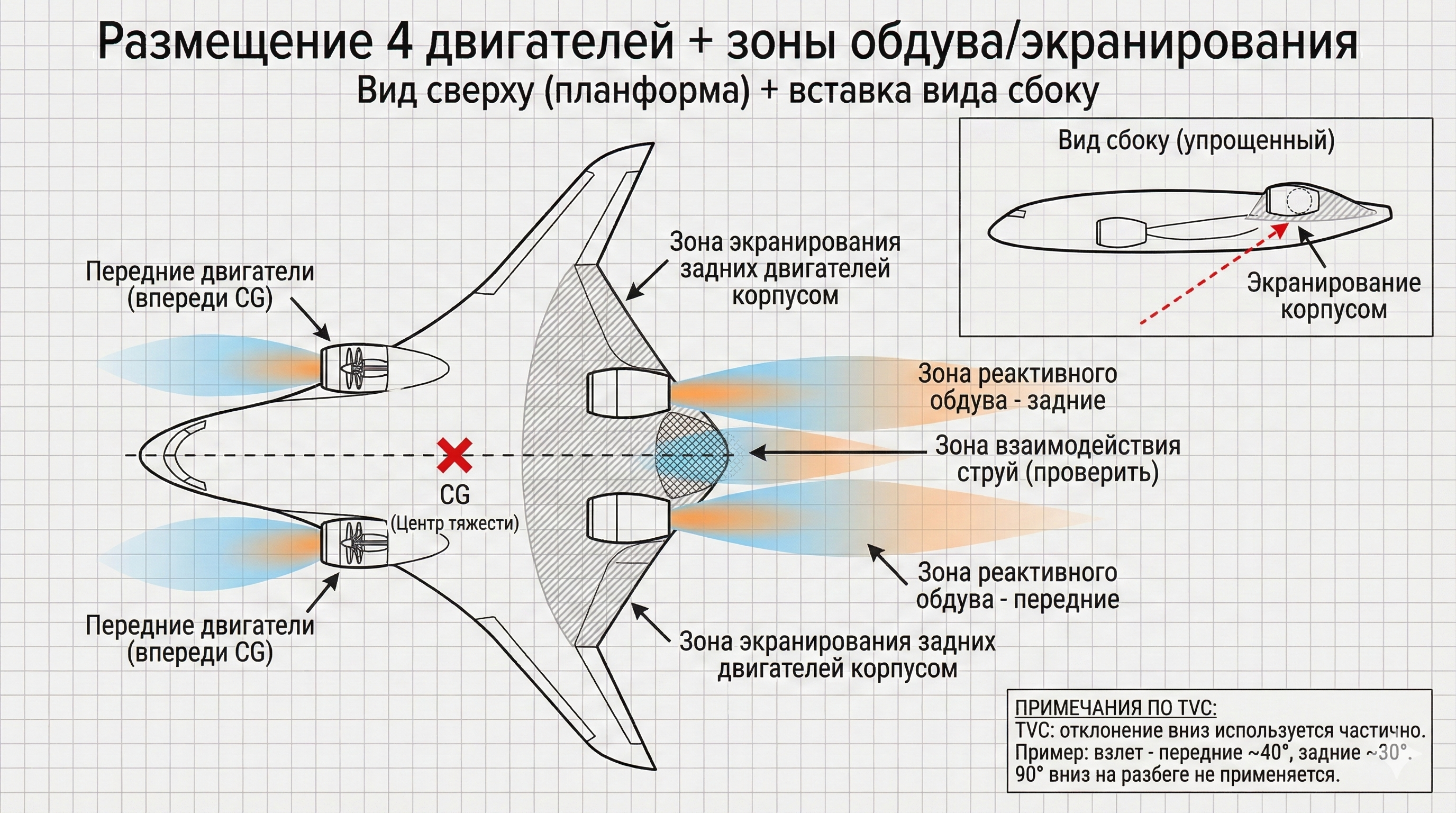
R4X оснащён четырьмя турбореактивными двухконтурными двигателями (ТРДД). Двигатели размещены нестандартно: 2 крупных двигателя установлены в хвостовой части сверху (по бокам центрального корпуса, вне оси симметрии), и 2 меньших двигателя - в носовой части снизу (под корпусом) с выносом вперёд примерно на половину длины гондолы. Такая схема выбрана для балансировки моментов и для обдува корпуса струёй (носовые двигатели обдувают нижнюю поверхность при взлёте, хвостовые - верхнюю заднюю кромку). Суммарная максимальная тяга установок - порядка ≈1200 кН (что соответствует четырём двигателям средней тяги ≈300 кН каждая, например, 2× мощность как у Trent XWB). На крейсерском режиме потребная тяга меньше, и часть двигателей может работать в пониженном режиме ради экономии топлива.
Управляемый вектор тяги (TVC)
Все 4 двигателя оснащены поворотными соплами, способными отклонять реактивную струю в широких пределах. Концептуально заложен диапазон отклонения по тангажу от 0° до 180° (то есть вниз-вверх, включая возможность развернуть тягу вперёд для торможения), и отклонение по курсу (в плоскости горизонта) примерно на ±15-20° от оси для дифференциального управления курсом.
Кроме того, реализован поворот вокруг продольной оси гондолы - т.е. возможность наклонять плоскость вектора (поворот roll каждой струи, угол поворота обозначается как 𝛾. Сочетание этих степеней свободы позволяет направлять вектор тяги практически в любом направлении в пределах конуса. На практике рабочие диапазоны будут ограничены конструктивно (скажем, тангаж ±45° для нормального полёта, курсовое ±15°), но концепт предусматривает максимально широкий угол для исследовательских целей. Управляемый вектор тяги - ключевой “фишкой” концепта: на взлёте отклонённая вниз тяга частично действует как подъёмная сила (эффект “поддува”, см. раздел 11) и позволяет оторваться на меньшей скорости. В полёте изменения вектора тяги используются для дополнительного управления угловым положением аппарата (тангаж, рыскание, крен - см. раздел 14, 15). При посадке умеренно отклонённая вниз тяга позволяет удерживать поток и подъёмную силу при сниженных скоростях захода. Наконец, при пробеге после посадки можно развернуть струю вперёд (TVC ≈180°) либо включить реверс - для активного торможения.
Компьютеризированная система управления полётом
Предполагается, что без высокоточной автоматической системы управления реализовать потенциал такой схемы невозможно. Поэтому R4X изначально проектируется с расчётом на Fly-by-Wire и даже Fly-by-Computation: все переходные режимы контролирует бортовой компьютер, перераспределяя тягу и отклонения рулей быстрее и точнее, чем это мог бы делать человек. Пилот (или оператор) задаёт целевое поведение (курс, высота, скорость), а система автоматически поддерживает устойчивость, демпфирует возмущения и вмешивается при опасных режимах (например, предотвращает сваливание). Такой подход аналогичен управлению БПЛА или тем же квадрокоптером, но применён к пилотируемому самолёту. В ручном режиме пилот всё равно будет оперировать привычными органами (штурвал/ручка тангажа-крена, педали рыскания, тяги), но их команды будут проходить через цифровой автопилот, распределяющий воздействие по электродвигателям сопел и аэродинамическим поверхностям (подобно тому, как EDSU в современном истребителе делает машину устойчивой).
В целом, сердце концепта R4X - это слияние необычной аэродинамики (несущий корпус) и активной системы управления (векторная тяга + компьютер). Комбинация этих решений призвана компенсировать взаимные недостатки: BWB-схема потенциально менее устойчива и может испытывать проблемы на низких скоростях (отрыв потока), но вектор тяги и цифровая система должны это компенсировать; с другой стороны, применение векторной тяги на самолёте большого размера облегчается тем, что несущий корпус даёт большой запас подъёмной силы, снижая требования к экстремальному отклонению струи (достаточно частичного, нет задачи висения). Таким образом, R4X - это демонстрация того, что “летающее крыло” можно научить летать медленно и устойчиво, используя интеллектуальное управление тягой.

Figure 1: Reference concept of a blended wing body airframe; wide lifting body with engines placed aft/above for noise shielding and aerodynamic integration.