Propulsion and Gas Path
Архитектура ТРДД, сопло Лаваля и управление струёй - без магии, только физика
- Почему выбран класс тяги 30-35 т и что это даёт платформе
- Разница высокой и низкой двухконтурности - где выигрываем и где теряем
- Структура тракта: inlet - fan - core - nozzle, и что критично для BWB
- Тяга как вектор: где заканчивается двигатель и начинается управление
12. Силовая установка и газодинамический тракт
Тип и класс двигателей
BWB-Jet R4X оснащается четырьмя турбореактивными двухконтурными двигателями большой тяги. Рассматриваемый класс - современные широкофюзеляжные двигатели тягой порядка 30-35 тс каждый (около 300-350 кН). Конкретно можно ориентироваться на Rolls-Royce Trent XWB-97 (на A350-1000) или GE9X (на Boeing 777X) - оба имеют диаметр вентилятора ≈3-3.5 м, массу ≈7-8 тонн, контурность ≈9-11, степень двухконтурного давления ≈50-60. Для целей проекта не требуется точного соответствия модели, поэтому далее описывается обобщённый ТРДД. Основная задача двигателя - развивать большую тягу на взлётных режимах и обеспечивать высокий удельный импульс (низкий удельный расход) на крейсерском. Высокая двухконтурность (много холодного воздуха через внешний контур) хороша для экономии топлива и снижения шума, но даёт более “холодную” и медленную струю, что уменьшает эффективность поддува. Низкая двухконтурность наоборот - более горячая и скоростная струя (выше реактивная скорость), лучше для подъёма. Компромисс: выбраны двигатели с умеренно высокой двухконтурностью (≈8-9), т.е. не максимальной как на линейных лайнерах (11). Внутренний контур (core) таких двигателей всё ещё способен выдавать очень энергичную струю. При необходимости, можно даже предусмотреть форсажную камеру в core-тракте, чтобы кратковременно увеличить истекающую скорость - но это усложнение, в данной стадии не закладывается.
Key takeaways
- Класс тяги 30-35 т даёт запас для TVC и коротких режимов без перегрева.
- Умеренная контурность (≈8-9) балансирует экономичность и силу струи.
Assumptions
- Используем современные ТРДД класса Trent/GE без точной привязки к модели.
- Внутренний core достаточно энергоёмкий для эффективного поддува.
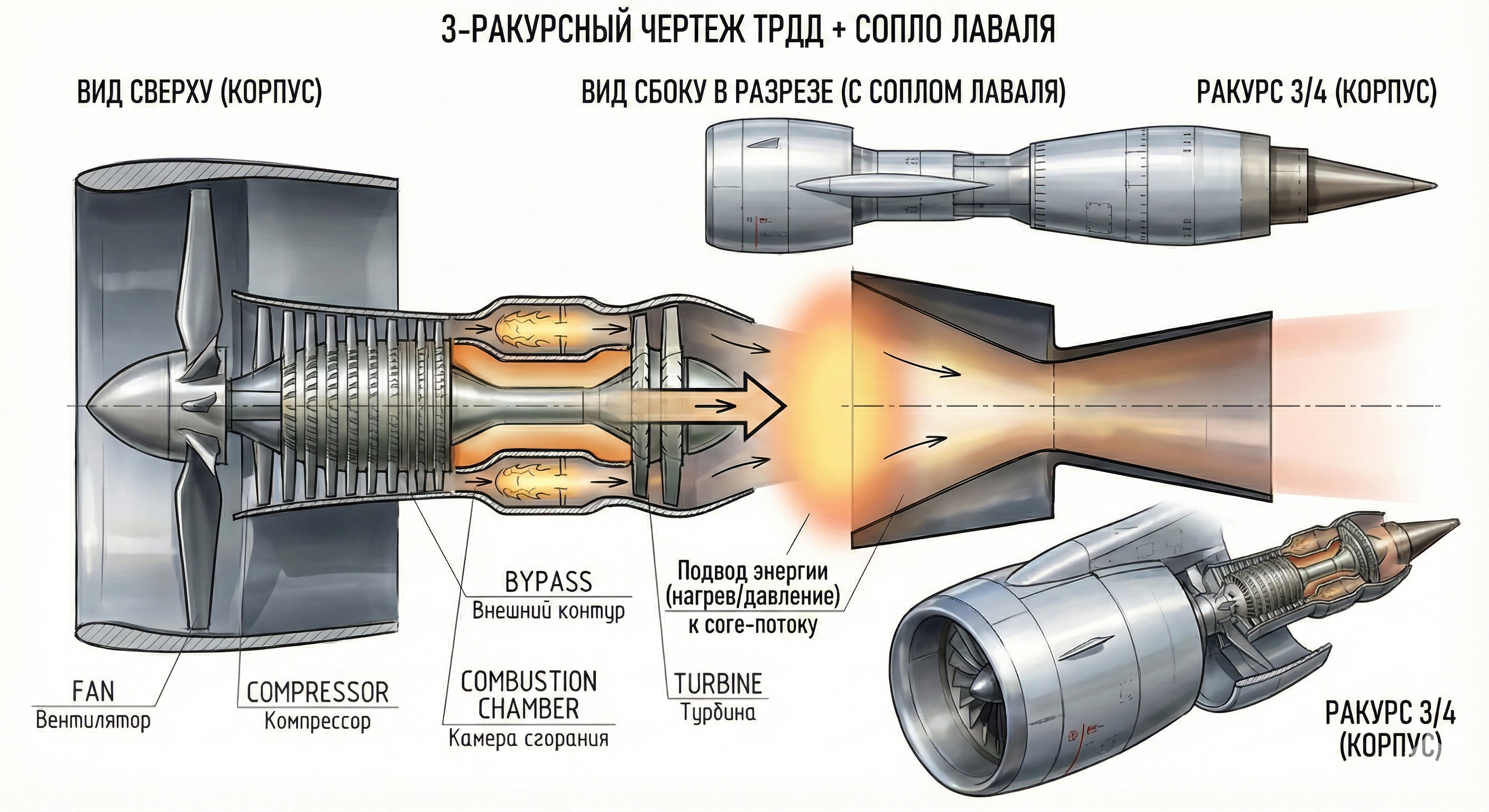
Figure 13: TBD. Not found as a captioned figure in the .docx text. Most likely a propulsion or gas-path schematic.
Воздухозаборники: каждый двигатель снабжён круглым осесимметричным воздухозаборником. Для задних двигателей - они обращены назад-вверх (под углом ≈30° к горизонту), для передних - вперёд-вниз (30° к горизонту). Форма входной кромки - классическая закруглённая (как у гражданских самолётов), оптимизированная на дозвуковой обтекание. Требование - равномерность поля давления на входе компрессора, иначе может возникнуть помпаж. Поэтому исключены резкие изгибы потока перед компрессором. Передние двигатели немного рискуют ingest поток от земли при разбеге, но высота установки выбрана достаточной (подбор показал, что при высоте >1.2 м от поверхности волна давления не переходит в поступление мусора). В перспективе возможно добавление инерционных сепараторов (отсекателей мусора) для передних двигателей, если испытания покажут проблему. Задние двигатели находятся в зоне влияния пограничного слоя корпуса - перед входами могут быть установки для улучшения срыва погранслоя (например, небольшие приплывы на корпусе или отсос погранслоя), но пока это не закладывалось.
Структура ТРДД (внутренний тракт)
типичный двухконтурный двигатель состоит из вентилятора, компрессоров, камеры сгорания, турбин и сопла. Кратко опишем, как работает тракт, и акцентируем внимание на ключевом элементе - сопле Лаваля:
-
Вентилятор (Fan) - большой передний компрессор, раскручиваемый турбиной. Он засасывает воздух и разделяет поток: часть идёт во внешний контур (обходит горячую часть, создавая “холодную” тягу), часть - в core (ядро двигателя). Fan вносит основной вклад в тягу на крейсерском режиме за счёт ускорения большого объёма воздуха при малом перепаде скорости (эффективнее по импульсу).
-
Компрессор низкого давления (LPC) - несколько ступеней компрессора, продолжает сжимать core-поток после вентилятора.
-
Компрессор высокого давления (HPC) - многокаскадный компрессор, доводит полное давление и температуру воздуха до значений, нужных для эффективного сгорания . Современные HPC могут повышать давление в 20-30 раз.
-
Камера сгорания - в ней впрыскивается топливо, смешивается с сжатым воздухом и сгорает. Температура продуктов резко возрастает (до ≈1800 K), часть давления падает (из-за протекания через жаровые трубы), но у газа появляется огромный запас внутренней энергии. Задача камеры - максимально полно сжечь топливо и равномерно распределить температуру на выходе (чтобы турбина не перегружалась локально).
-
Турбина высокого давления (HPT) - сразу за камерой, отбирает часть энергии газов для привода HPC.
-
Турбина низкого давления (LPT) - дальше, отбирает оставшуюся энергию для привода вентилятора и LPC. После турбин газ ещё имеет высокое давление и температуру, но существенно потерял энергию на вращение роторов.
-
Выходное сопло - конфузорно-диффузорный канал, где энергия расширения преобразуется в скорость струи. Здесь газ, всё ещё под повышенным давлением, расширяется до околобарометрического давления, ускоряясь на выход. Для большого реактивного двигателя доля тяги от core-струи ≈20-30% (остальное даёт холодный контур). Тем не менее, core-струя выходит очень быстрым потоком (сверхзвуковым при полном режиме).
Почему сопло Лаваля
обычная трубчатая труба не позволяет газу разогнаться сверхзвуково - при достижении M=1 в самом узком сечении (горле) поток “захлебывается” (чокируется), если давление впереди недостаточно сбросилось. Для дальнейшего ускорения нужен расширяющийся канал после горла - дивергент. Сопло Лаваля имеет именно такую форму: узкое горло, где достигается M=1 (при достаточном перепаде давлений), и расширяющаяся часть, где газ, уже ставший сверхзвуковым, расширяясь, ускоряется дальше. Таким образом достигается бóльшая истечная скорость струи, а значит - бóльшая реактивная тяга (по закону сохранения импульса). R4X не планируется как сверхзвуковой самолёт, но его двигатели в режиме максимальной тяги работают с M>1 в соплах, т.е. реализуют полный потенциал энергии сгорания в ускорении газа.
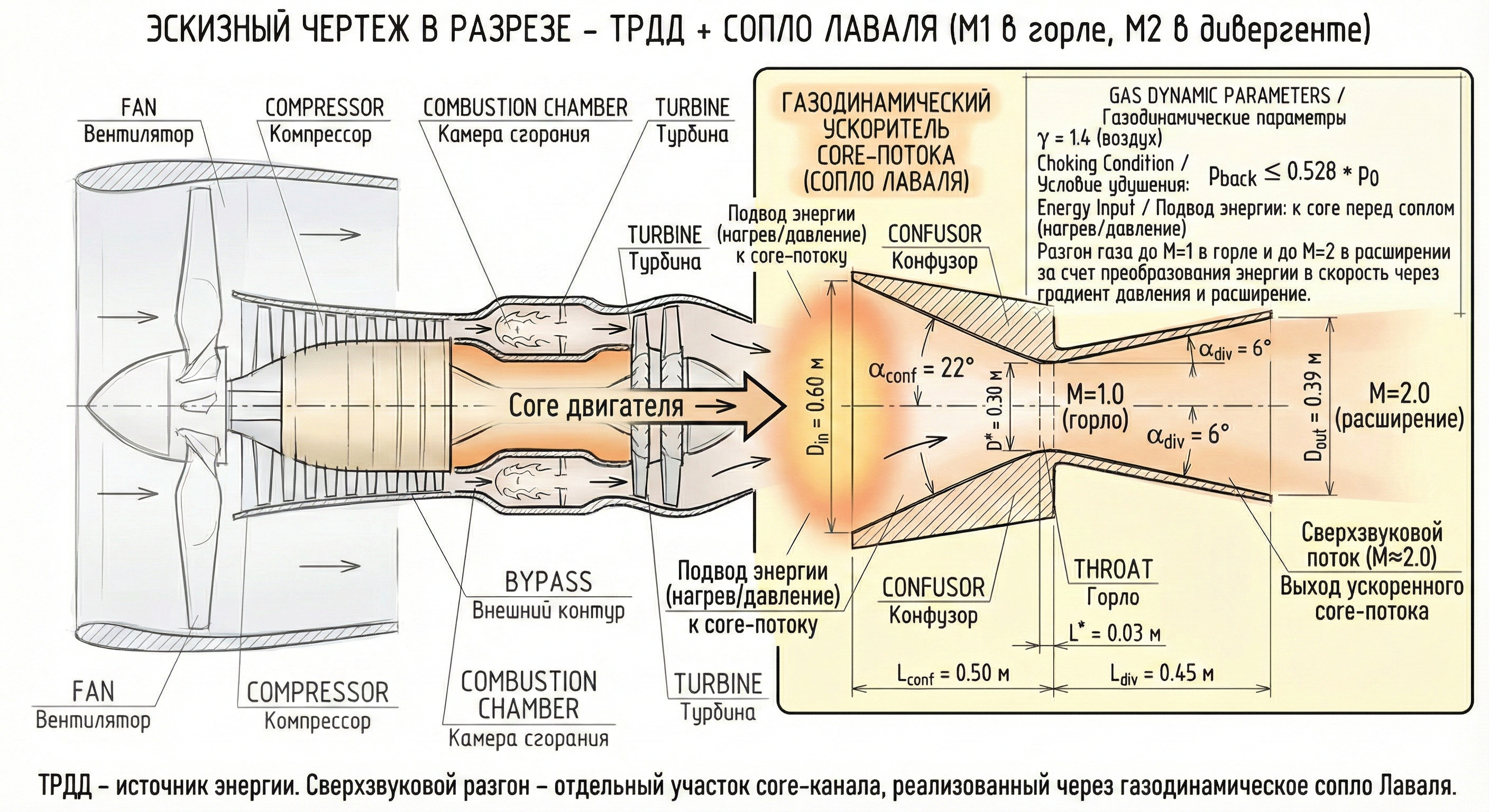
Условие чокирования (удушения)
как отмечалось, для достижения M=1 в горле нужно определённое падение давления: эмпирически для воздуха (коэффициент адиабаты) граница примерно . Иными словами, давление за соплом должно быть менее ≈53% от полного давления газа до сопла. Если это не выполнено (например, на малых режимах или при слишком высоком давлении окружающей среды - случай, когда двигатель на земле, а= атмосферное давление 1 бар, упал меньше ≈1.9 бар), то поток не достигает M=1 и вместо этого в дивергенте возникает нормальный скачок уплотнения (сверхзвуковой поток резко тормозится до дозвука). Это нежелательное явление: часть канала работает в неправильном режиме, появляются турбулентные зоны, падает тяга, растут вибрации. К счастью, на взлётных режимах современные двигатели всегда имеют достаточный перепад (в камере может быть >40 бар, атмосфера 1 бар, так что условие легко выполнено). На крейсерском режиме тоже - там ниже (разреженный воздух). Так что в штатных режимах наши сопла будут работать в режиме полного расширения (или слегка недорасширенного). А вот при испытаниях на стенде (на уровне моря) возможны режимы с недо- или перерасширением - это учитывается и, при необходимости, компенсируется (например, водяным экраном при тестах).
Ударные волны и их контроль
упомянутые скачки уплотнения - это разрывы режима, в которых часть энергии потока диссипируется в тепло и шум. В авиации их стараются контролировать: в воздухозаборниках сверхзвуковых ЛА используют системы рамп и клиньев (но у нас дозвук, нам это не нужно для впуска). В соплах - делают плавное расширение (угол не слишком большой, у нас ≈6°) и гладкие стенки, чтобы если скачки и возникали, то равномерно распределялись без локальных отрывов. В дорогих проектах применяют переменное сечение сопла (регулируемые створки) - в нашем концепте можно такое предположить (например, для улучшения работы TVC), но это усложнение. Пока решено остановиться на фиксированной геометрии с компромиссом, обеспечивающим приемлемую работу в основном диапазоне высот.
Тяга и вектор отклонения
каждый двигатель R4X может отклонять вектор тяги в двух плоскостях и вращать вокруг оси (см. раздел 5 и 9). Конструктивно это достигается поворотной частью сопла, примерно последней четвертью канала. Эта часть может отклоняться на угол до 15-20° в любую сторону от оси. При необходимости больших углов - возможно немного поворачивать сам двигатель целиком на карданном подвесе (но это очень тяжело, скорее нереализуемо в металле на таком классе двигателей). Поэтому рассматриваем комбинацию: небольшой поворот агрегата (±5°) + большой поворот насадки (±15°), что в сумме даёт до ±20°. Этого достаточно, чтобы проекция тяги по вертикали составляла ≈34% от полной (при 20°) - а нам для любых манёвров больше и не требуется. На старте мы говорили о 0-180° для концепта - это скорее условное требование, показывающее свободу: в реальности, например, для реверса мы можем довернуть сопло на ≈120° вниз-назад, а остальное сделать щитками-отражателями (как у стандартного реверсора). Это вопрос технической реализации. Далее, динамика отклонения: приводы сопла должны быть быстрыми, чтобы эффективно демпфировать колебания ЛА. Целевой показатель - время отклонения на ±10° не более 1 секунды (это довольно быстро для массивного узла, но реализуемо мощными электроприводами). На больших углах (например, перестановка на реверс 120°) допустимо время 2-3 секунды, т.к. это не настолько срочная операция.
Температурный режим и охлаждение
сопла работают с горячим потоком (температура газа на входе ≈1100-1200 K после турбины). Стенки сопла должны выдерживать длительно порядка 600-700°C. Для этого обычно используют жаропрочные сплавы (никелевые, кобальтовые). Но у нас сопло ещё и поворотное - значит, нужны подвижные стыки, что сложно при таких T. Возможно применение активного охлаждения: например, отбор чуть воздуха из компрессора и продувка им полости сопла. Этот метод используется на военных форсажных соплах. Мы закладываем его в проект - небольшая часть воздуха (≈2% от расхода) пойдёт на охлаждение и продувку сопловых штанг, чтобы уберечь приводы от перегрева.
Влияние струи на планер
струи задних двигателей направлены над верхней поверхностью, струи передних - под нижней поверхностью. При отклонении вниз струи буквально обтекают крыло: верхние - дуют на верхнюю поверхность задней кромки, нижние - на нижнюю поверхность передней части. Это даёт желаемый поддув (повышение ), но несёт и риски: нагрев поверхности и аэродинамические возмущения. Оценки показывают: при работе на макс. режиме и отклонении 45° вниз, температура газов на расстоянии ≈5-8 м от среза сопла упадет до ≈300-400°C (из-за смешения с холодным воздухом внешнего контура и атмосферой). Такая струя скользит по поверхности крыла, нагревая её до порядка 150°C локально. Это безопасно для углепластика (он теряет прочность >200°C), но нужно исключить длительное воздействие. Поэтому ТВС в таком режиме будет работать лишь короткими импульсами (взлёт, посадка). При крейсерском полёте же сопла нейтральны, и нагрев постоянный минимальный. Аэродинамически, взаимодействие струи с поверхностью может вызвать нестационарные давления (пульсации), особенно если есть склонность к образованию локальных ударных волн. Но при наших скоростях потока (M≈2) и гладких формах крыла, значительных стоячих ударных волн на крыле не ожидается. Будут лишь скачки на краю струи (Mixing layer), но они не должны приводить к нагрузкам на крыло. Тем не менее, в испытаниях надо будет это проверить (см. раздел 25).
Выбор режима работы двигателей
для экономичной эксплуатации в крейсерском полёте, 4 двигателя - это много (избыточно). Возможно, в некоторых случаях будет использоваться тяга на пониженных оборотах или отключение части двигателей на крейсер (например, носовые можно глушить, а задние оставить). Проектом не исключается такая возможность, но нужно быть осторожным: остановленный двигатель - это мертвый вес и сопротивление. Более рационально - просто снизить обороты и выйти на режим малофорсированный, тогда расход будет низким, но все двигатели готовы сразу дать мощность при необходимости. В условиях отказа (см. раздел 22), три оставшихся могут без проблем обеспечить продолжение полёта. Два отказавших - уже серьёзно, но можно удержаться (два оставшихся = ≈0.2 T/W, что еще вполне летуче на малой высоте, а на эшелоне возможно снижение).
Воздушно-реактивный запуск
запуск двигателей - стандартный, от ВСУ (APU) через воздушные турбостартеры. ВСУ небольшая, например аналог Boeing 787 (Honeywell HGT1700). Её размещение - в хвостовой верхней точке, между гондолами задних двигателей, чтобы выхлоп APU не мешал. Электропитание от батарей может прокручивать двигатели, но обычно это не нужно.
Перспективы развития
силовая установка R4X - гибкая платформа. В дальнейшем можно рассмотреть применение открытых роторов (Open Rotor) или электровентиляторов (с газогенератором и электромоторами в контурах). Это может повысить экономичность и ещё снизить шум. Однако такие системы сложнее интегрировать с TVC. Потому пока базируемся на проверенной схеме: обычные ТРДД с отклоняемым соплом. Возможно, на более поздних этапах (при переходе к демонстратору 2.0) будут рассмотрены гибридные схемы (электрические распределённые вентиляторы по задней кромке). Но это за рамками текущего отчёта.