Flight Control System
Fly-by-wire, режимы, защиты и отказоустойчивость - контроль как продукт
FBW-система задаёт поведение самолёта и удерживает границы по устойчивости и нагрузкам. Режимы degraded/direct обеспечивают предсказуемость при отказах.
- Архитектура FBW: датчики - вычислители - исполнительные органы
- Режимы: normal / degraded / direct (без привязки к брендам)
- Защиты и ограничения: что автомат держит сам, а что отдаёт пилоту
- Логика отказов: что должно продолжать работать при частичных отказах
15. Система управления и автоматизация (Flight Control System)
Уровни управления
система управления полётом R4X реализует несколько режимов работы (по аналогии с современными FBW-самолётами): - Директ-режим (Direct) - ручной, без стабилизации (только прямая передача команд пилота на органы с некоторыми ограничениями). Используется лишь в аварийных ситуациях, т.к. самолёт в нём трудно стабилизировать. - Стабилизированный режим (Normal) - основной: пилот отдаёт команды отклонения (или траектории), а компьютер гарантирует устойчивость, ограничивает углы, скорости, перегрузки. Здесь реализуются функции Envelope Protection - защита от выхода за опасные границы (например, по крену, тангажу, AoA, перегрузке). Также включены демпферы колебаний, авто-тангаж для выдерживания скорости на глиссаде, авторежим тяги. - Полуавтоматический (Augmented) - пилот задаёт стратегические цели (набор высоты, курс, скорость), а автопилот исполняет. Это как обычный Autopilot mode. Может использоваться в крейсерском полёте. - Аварийные режимы (Emergency) - в случае определённых отказов (например, потеря датчиков) система может перейти на упрощённые алгоритмы либо передать управление пилоту с минимальными помощниками. Об этом подробнее в разделе «Действия в случае отказов».
Key takeaways
- Контур FBW объединяет сенсоры, вычислители и исполнительные органы.
- Normal режим обеспечивает защиты и демпфирование по всем осям.
- Degraded/Direct режимы ограничивают функциональность ради сохранения управления.
- Алгоритмы должны предсказуемо вмешиваться при отказах.
Assumptions
- Три вычислительных канала FCC дают мажоритарное голосование.
- Системы защиты имеют приоритет над комфортом и экономией.
- Смешивание тяг/рулей остаётся доступным при частичных отказах.
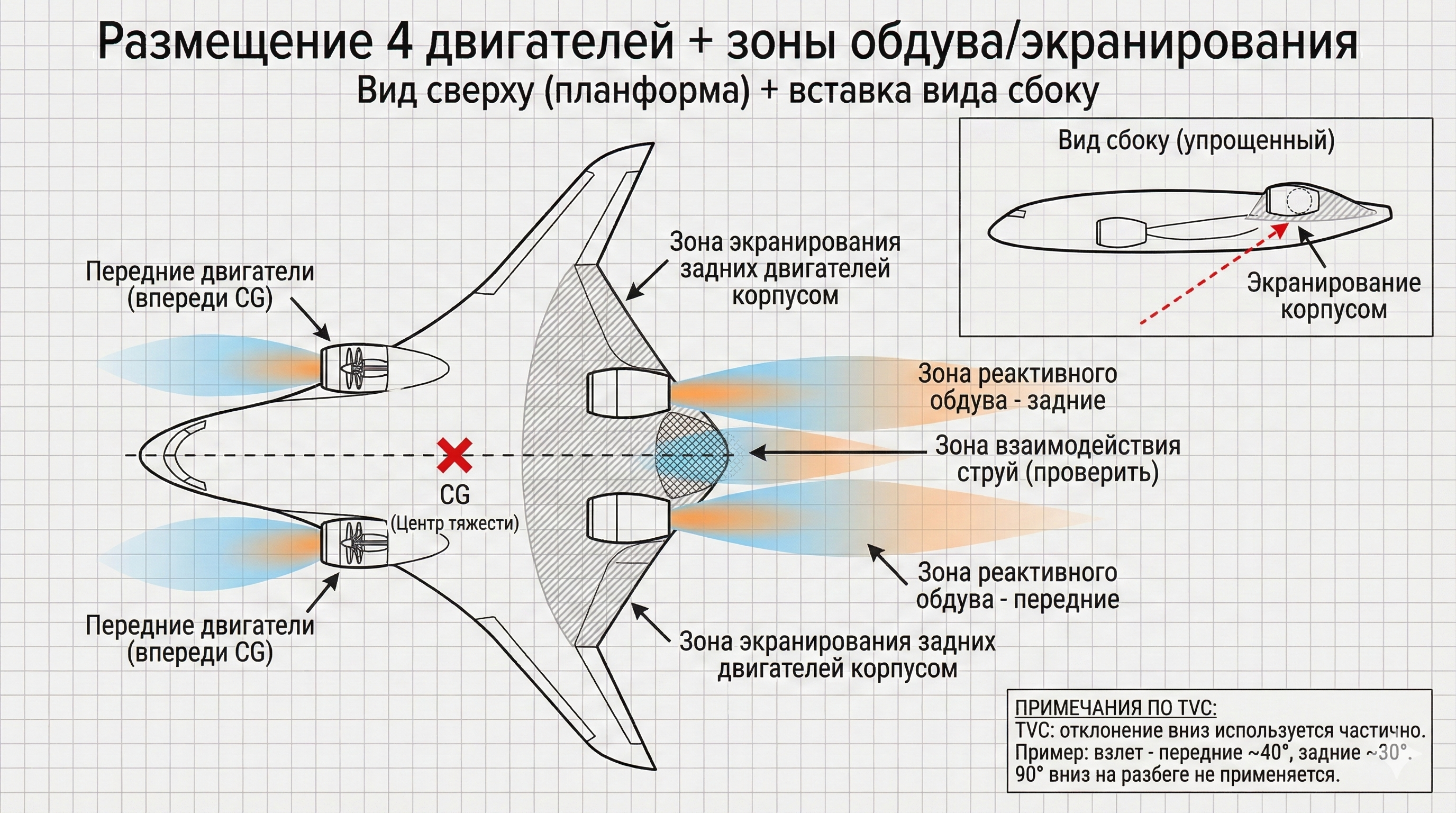
Пилот взаимодействует через: боковая ручка или традиционный штурвал (решится позднее) - для команд по крену/тангажу, педали - рыскание, рычаги двигателей - тяга. Однако, например, при раскрутке двигателей на взлёт Full Throttle автоматика сама решает, на какой угол отклонить сопла - пилоту не нужно этим оперировать. Если же он захочет, у него есть контроллер TVC (типа триммера джойстик), но это для экспертов.
Датчики и источники информации
FCS использует:
- Инерциальная система (лазерные гироскопы, аксели) - даёт угловые скорости, ориентацию и их производные.
- Воздушные датчики: приемники полного давления (для IAS), статического (высота), угломеры потока (AoA, AoS - угол скольжения). Они много избыточны: установлены 4 зонда по периметру носа, соединены в Air Data Computer.
- Датчики положения ВСУ и органов: энкодеры углов сопел, потенциометры отклонения рулей, стойки шасси (концевики).
- Датчики системы: давления и температуры топлива, масла, вибрации двигателя (встроенные).
- Спутниковая навигация (GPS/Galileo) и радиовысотомер - для абсолютного положения и контроля снижения на малых высотах.
- Камеры обзора (опционально): на прототип устанавливаются для визуального контроля струй и механизации (выдает поток данных на землю).
Приводы и исполнительные механизмы
- Приводы сопел - электрические вращательные, по 2 на каждое сопло (дублирование). Их контролирует отдельный модуль (FADEC + TVC drive), который получает команды угла от FCC.
- Приводы рулей - электромеханические линейные, по 2 на каждую поверхность (спаренные).
- Руль направления как таковой отсутствует - его роль играют дифференциальные элевоны и TVC, их приводы уже перечислены.
- Дроссель двигателя - цифровой, FADEC. FCC может как напрямую управлять тягой, так и устанавливать ограничения (например, чтобы два соседних двигателя не сильно отличались, либо ограничивать резкость изменения чтобы не вызвать проблем).
Логика вмешательства автоматики
- На взлёте - как ранее описано, после разбега и отрыва включается режим стабилизации траектории: автопилот удерживает курс по магнину, плавно задаёт тангаж для набора (в соответствии с профилем climb-out), контролирует симметрию тяги. Пилоту фактически остаётся следить и контролировать высоту перехода и уборку шасси/закрылков. Можно сказать, взлёт проходит под надзором компьютера (конечно, пилот может отключить, но нет смысла - система быстрее среагирует, если что).
- В крейсере - автоматика особо не мешает, только демпфирует нежелательные колебания. Пилот может руками вести (скажем, при маневрировании), либо включить обычный автопилот (набор эшелона, повороты по маршруту - стандартно).
- При заходе - снова, рекомендовано использовать Landing assist режим: автопилот ведёт по глиссаде или, если визуально, то хотя бы поддерживает скорость. На финальном этапе (flare) лучше доверить пилоту, но TVC тоже, как говорилось, вмешается чтобы смягчить касание.
- При отказах - автоматика может частично или полностью отключиться в зависимости от отказа. Однако, для многих отказов логика предусмотрена: например, при отказе одного двигателя FCC сразу переходит в режим Engine-out compensation: убирает часть тяги на противоположном двигателе для симметрии (если это приемлемо), или отклоняет сопла оставшихся так, чтобы скомпенсировать момент (как упоминалось). Это произойдёт ещё до того, как пилот сумеет осознать проблему. Конечно, затем пилот принимает решение (возврат на базу и т.д.), но первая реакция - от машины.
- Ограничения вмешательства: заложены лимиты, за которые автоматика не зайдет. Например, не будет противодействовать вводу пилотом крена > 60° (если пилот так решил - его ответственность), но предупредит (дисплей красный). Не будет ограничивать перегрузку, если пилот активно тянет больше (возможно, это нужно для манёвра уклонения). Однако, если действие явно ведёт к катастрофе (скажем, пилот даст команду пикировать в землю), система попытается воспрепятствовать (это этическая дилемма - но в тестовом самолёте такое не рассматривается, скорее).
Датчики и отказоустойчивость управления
все критические сенсоры и вычислители продублированы. Например, курсовертикаль - 3 комплекта, Pitot/AoA - 4, FCC - 3 канала. Это значит, что один отказ - не проблема; два - всё ещё иногда можно (major failure, но обычно система перейдет в ограниченный режим). Исполнительные механизмы - тоже с резервом (сопла по 2, рули по 2). Разработана стратегия “fail-operational” - то есть один отказ не нарушит выполнения задачи, а два (редкий случай) - безопасно ухудшат (fail-safe). См. раздел 21.
Особенности ПО и алгоритмов
система управления R4X - очень сложное программное обеспечение. Оно разбито на подсистемы: Control Law (законы управления по тангажу, крену, курсу), Engine Vectoring Control (подсистема, управляющая распределением тяг), Envelope Monitoring (мониторинг границ), Redundancy Management (выявление отказов датчиков и переключение), Display & Warning (интерфейс с экипажем). Все эти подсистемы работают на трёхканальном вычислителе FCC, написаны на безопасном языке (Ada или C++ с ограничениями), сертифицируются по DO-178C Level A (самый строгий). В рамках экспериментальной программы, возможно, сертификация упрощена, но всё равно уровень надёжности ПО должен быть высоким, иначе сам проект не взлетит (буквально). Для ускорения разработки, часть функций может быть реализована на уже существующих решениях (например, автопилот можно взять гражданский от Honeywell и доработать под наш планер, чтобы не писать с нуля). Но уникальная часть - это управление TVC и смешивание, этого нет нигде готового, придётся разрабатывать.
Когда автоматика вмешивается подытожим:
- постоянно - демпфирование, стабилизация;
- в критических ситуациях - ограничивает и исправляет (stall, overspeed, overbank),
- при отказах - берёт на себя компенсирующие действия;
- при нормальном пилотировании - незаметна, либо выполняет команды (в режиме AP).
Человеко-машинный интерфейс
важно, чтобы пилоты (особенно испытатели) понимали, что делает система. Для этого в кабине на дисплеях отображаются текущие отклонения сопел (в виде схематического рисунка самолёта, где видно, куда направлены струи). Также индицируется режим (Normal, Direct, etc.). Если автоматика вмешалась в команду (например, пилот взял резко на себя, а она ограничила, чтобы не выйти за AoA) - на индикаторе загорится, что сработала защита (например, AOA LIM). Это нужно для доверия - чтобы лётчик не пытался бороться с машиной, не понимая, почему та “не даёт”. В целом, как отметили пилоты-испытатели (гипотетически) - управление R4X “по ощущениям похоже на обычный самолёт, только очень вялый по курсу, если отключить комп”. Но с компом - “летит как по рельсам”.
Таким образом, FCS R4X - это нервная система самолёта, без которой он существовать не может. Её разработка - одна из самых инновационных частей проекта, сопряжённая с серьёзными вычислительными и алгоритмическими задачами. Но она же позволяет реализовать сам концепт, делая потенциально неустойчивую схему - жизнеспособной.