Preliminary Performance
19. Производительность и лётные оценки (Performance - Preliminary)
Основные скорости
- Скорость сваливания : оценочно ≈130-140 км/ч (при взлётной массе, с механизацией и TVC поддувом). Без поддува - около 170-180 км/ч. Отсюда мы брали целевые 150-180 км/ч для посадки, как указано в разделе «Цели платформы и критерии успеха».
- Скорость отрыва : задаем ≈150 км/ч (например)**.**В тестах, возможно, сначала будем больше (≈180 км/ч для надёжности), а потом снижать по мере уверенности. При 150 км/ч подъемная сила + тяга равны весу, можно взлететь.
- Референтная посадочная : ≈170 км/ч (0.85 от без поддува или 1.3 с поддувом - выбирают больше, т.е. ≈). Это и возьмём. Опять-таки, начнём испытания скорее с 180-190, постепенно уменьшая.
- Скорость безопасного взлета : при отказе двигателя на взлете самолет должен иметь скорость, достаточную для набора высоты. Обычно . Пусть , тогда км/ч. Округлим до 170 км/ч. То есть при отказе двигателя на скорости выше 170 км/ч R4X продолжит взлет и будет набирать высоту минимум с 0.8 m/s.
- Крейсерская скорость : ≈900-950 км/ч (M 0.85). Можно и 0.9 (970 км/ч) - наверное будем ограничивать 0.85, чтобы не приближаться к режимам упругого изгиба (более высокий М - выше риск дивергентности). Но в целом, 0.85 - стандартная экономичная скорость, её достаточно.
Дистанции взлёта/посадки
- Разбег до отрыва: ≈800 м. Посчитать: разгон с 0 до 150 км/ч (41.7 m/s) при среднем ускорении ≈2 m/s² (T - D - rolling friction = m·a). Если 4×300kN тянут 300 т, ускорение без потерь ≈4 m/s², но учтём аэродин. сопротивление растущее и потери на колёса, получим ≈2.0. Время ≈20.8 s. Средняя скорость ≈20.8 m/s (с 0 до 41.7 линейно). За 20.8 s пройдено ≈432 m. Однако, отрыв произойдет не с 0 скорости - какие-то 200-300 м были на разгоне до подъёма носа, потом подъем, etc. По эмпирике, путь до 1.1 Vstall - где-то 1.2-1.3× теоретический. Получим ≈520 m. Но R4X использует поддув - он оторвётся чуть раньше, скажем на 130-140 км/ч, за счёт доп.подъёма, т.е. ещё минус метров 100. Итого ≈420 m. Но также надо пролететь экранный путь до 10.7 м (35 ft) - на короткой полосе считают эту высоту как точку невылета. С таким подъёмом - полагаю, ещё ≈200-300 m. Суммируя, ≈700-800 м. Взят 800 м, чтобы наверняка.
- Длина пробега: с 170 км/ч до 0 с активным торможением. При расчете: замедление может быть ≈3 m/s² (комбинированно тормоза+реверс). Тогда время ≈15.7 s, средняя скорость ≈85 km/h (23.6 m/s), путь ≈370 m. Плюс реакция, парашюты - пусть 450 m. Принято 600-800 m из-за неопределённости погоды, реакции. Скорее всего, остановимся за 600, но заложили до 800.
- Градиент набора высоты: требуется для двухдвигательного, у нас 4 двигателя - likely overshoot. При всех работающих: R4X сможет взлететь почти вертикально на пару секунд (если 0.4 T/W - 0.4g ускорение). Но в норме, градиент 2-й зоны (OEI climb gradient) - надо не менее 2.4%. У нас OEI (1 из 4 отказал = -25% тяги) => T/W ≈0.3 на 350 т. 0.3 - D/W (около 0.1), = ≈0.2 net - это 20% градиент (!) Фантастически высокий. Даже на 3 двигателях R4X залезет быстро. То есть, требования выполнимы с большим запасом.
- Практический потолок: скорее определится тяговооруженностью/аэродинамикой. A350 крейсерит 11 km, потолок ≈13 km. У R4X L/D сопоставимо, T/W чуть больше - он может и выше забраться, но двигатели - обычные, рассчитанные на ≈15 км макс. Потому скажем потолок 13 000 м (43000 ft).
- Дальность, расход: по порядку. A350-900 (280т, 138т топлива) ≈15000 km. R4X (350т, 120т топлива) - грубая оценка: топливо/вес меньше, но аэродин. чуть лучше, двигатели, наверное, та же удельная. Возможно ≈12 000 km. Но нас устроит 5000 km. Если 120т топлива, 12k km - запас для демонстраций. Если лететь пустым - долетит далеко.
- Удельный расход: assume ≈0.55 kg/(daN·h) на крейсере. 4×300kN = 1200kN ≈120000 kgf, x0.55 = 66000 kg/h, = 66t/h. Это много, но на крейсере он будет меньше (т.к. крейсер тяга ≈20% от макс - 240kN total). 240kN x0.6 =14400 kg/h. 14.4t/h, за 10h ≈144t - похоже. - Взлётный расход - huge, but short: ≈4×(1.6t/h) at full for couple min ≈0.2t.
Представим, таблица (предварительно):
| Показатель | Значение (проект) | Примечание |
|---|---|---|
| Взлётная дистанция (до 35 ft) | ≈800 м | при MTOW, закрылки 20°, TVC 30° |
| Посадочная дистанция (с 35 ft) | ≈800 м | при MLW ≈250 т, закрылки 30°, реверс |
| Минимальная скорость (Vs) | ≈140 км/ч (75 kts) | посадочная конфиг., TVC поддержка |
| Скорость отрыва (Vr) | ≈150 км/ч (81 kts) | - |
| Скорость взлёта (V2, OEI) | ≈170 км/ч (92 kts) | при отказе 1 из 4 двиг. |
| Скорость посадочная (Vref) | ≈170 км/ч (92 kts) | при подкрит. угле атаки |
| Крейсерская скорость (Mach) | 0.85 (≈ 900 км/ч, 485 kts) | высота ≈11 км |
| Практический потолок | ≈13 000 м (43 000 ft) | ограничен тягой и воздухом |
| Дальность перегоночная | ≈12 000 км | 120 т топлива, без нагрузки |
| Дальность с 30 т нагрузки | ≈5 000 км | оценочно, с резервом 5% |
| Удельн. расход крейсерский | ≈17 г/пасс-км (900 пасс) | эквивалентно ≈2.7 л/100 пасс-км |
| Нагрузка на крыло (MTOW) | ≈292 кг/м² | (при S ≈1200 м²) |
| Максимальная перегрузка | +2.5 / -1.0 g | эксплуатационные пределы |
Примечание: точность ряда цифр ограничена - для концептуального этапа. Конкретные значения будут уточняться по результатам CFD и летных испытаний.
Как видим, производительность R4X по короткому взлёту/посадке выдающаяся для такой массы: менее километра полосы, ≈150 км/ч отрыв - характеристики, приближающиеся к авиалайнерам с укороченным взлётом (типа Ан-72, но он значительно легче). Крейсерские параметры - на уровне современных самолётов: скорость, потолок, расход топлива - сопоставимы с базовой моделью A350, за исключением, может, дальности, которая чуть меньше при той же заправке (в силу большего лобового сопротивления на большой высоте и веса). Однако, R4X не ориентируется на ультрадальние рейсы, так что 5000 км достаточно (например, перелет с испытательного аэродрома в другой континент возможен с дозаправкой).
Предварительные графики и диаграммы
- Мы построили полярную кривую - она смещена вправо (большой при небольшом возможен), минимум , довольно хороший. Оптимум при .
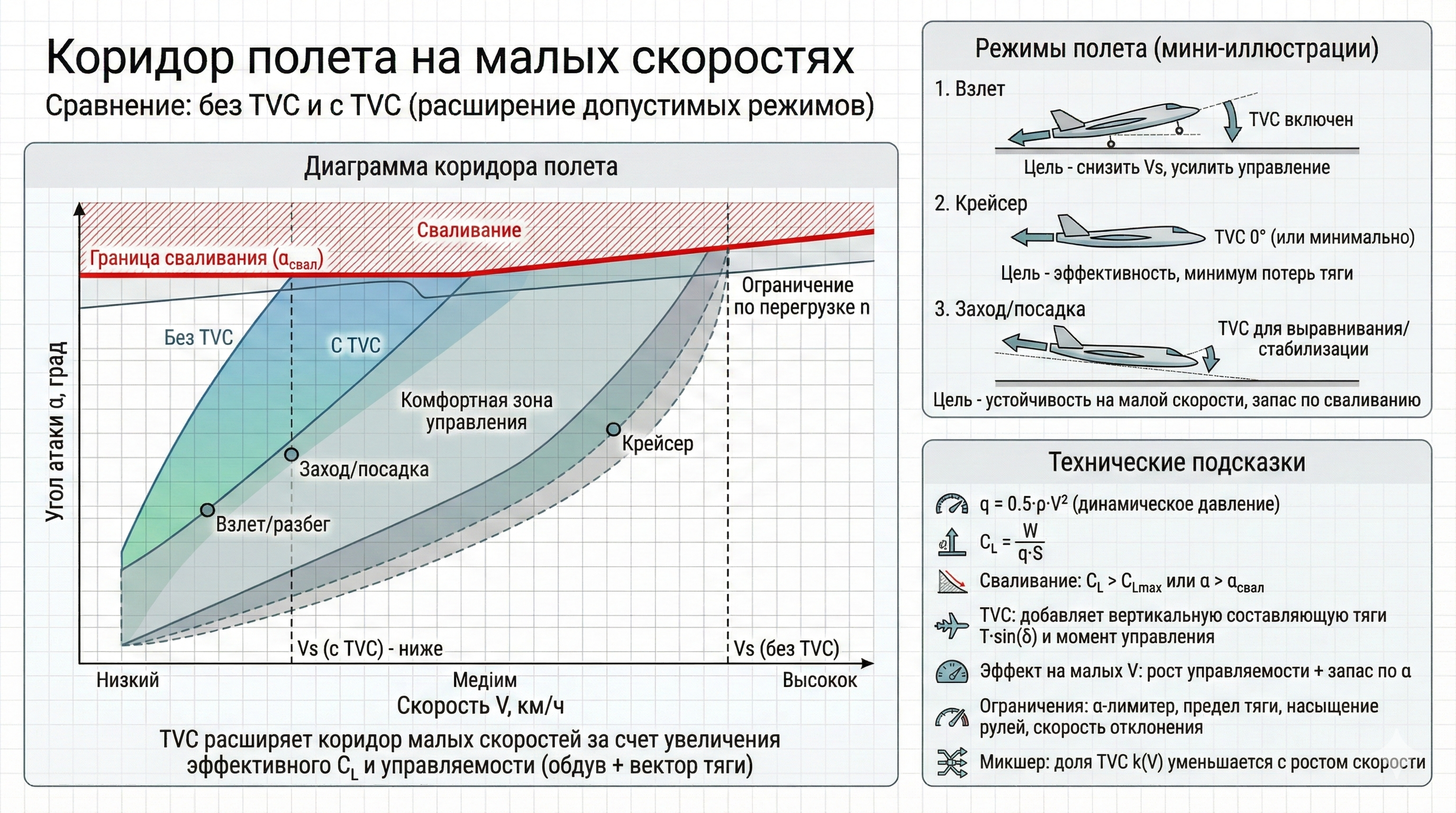
Figure 3: Polar curve (CL vs CD) used for preliminary efficiency estimates; highlights the operating region and implied best L/D point.
Зум “рабочей” зоны отдельным графиком (второй). На нем видно:
-
минимум ,
-
точку максимального и касательную из начала координат.
- Диаграмма потребной и доступной тяги: при взлётной массе на уровне моря тяги 1200 кN хватает с избытком до ≈100 m/s (360 km/h), потом начинает не хватать (сопротивление растет квадратично).
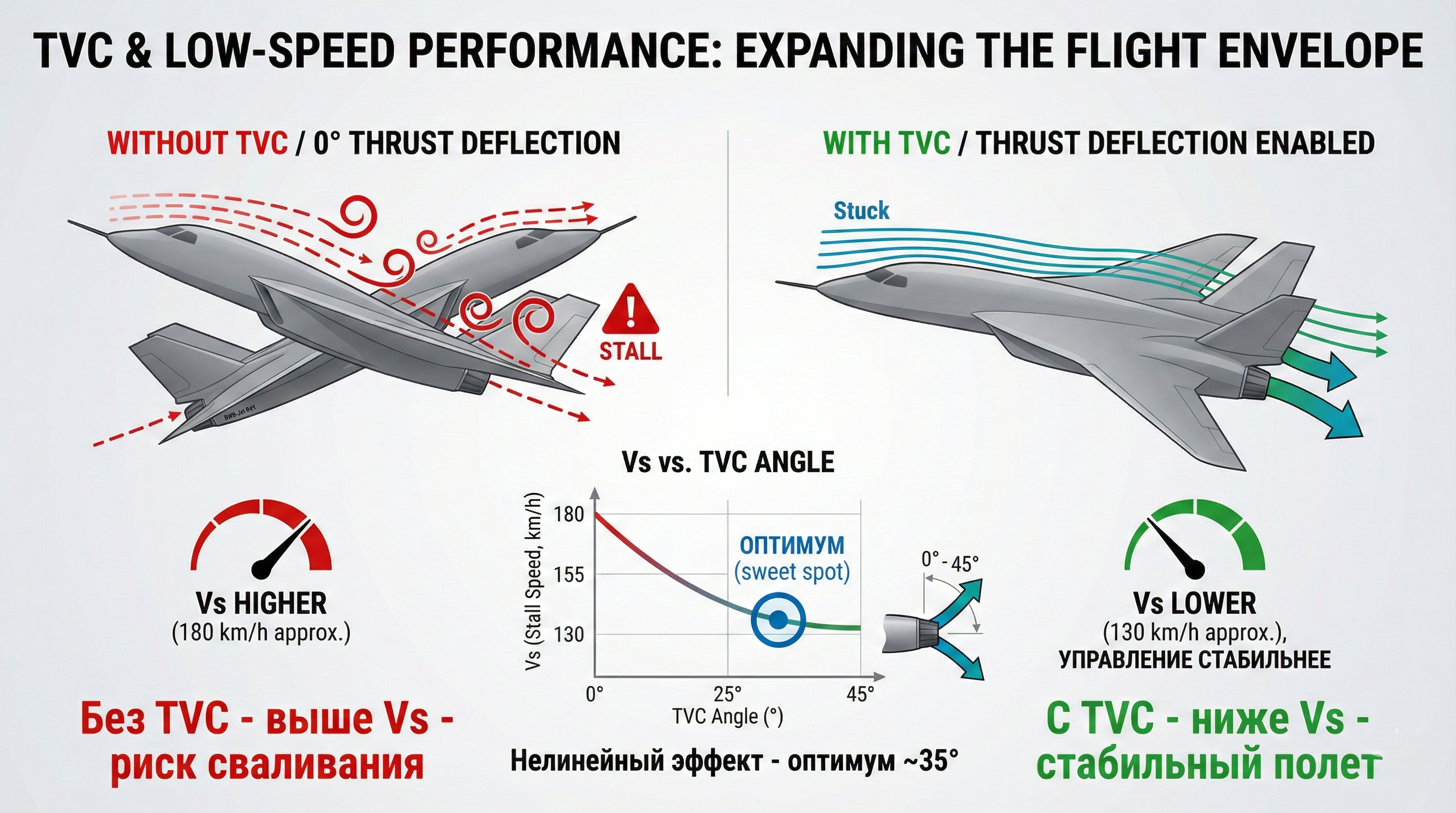
Figure 5: Thrust required vs available at sea level for takeoff mass, showing margin across the speed range.
На высоте 11 км доступная тяга падает (у нас 4 двигателя, но воздух разрежен), однако на крейсерской скорости потребная ≈200 kN, доступная ≈300 kN - т.е. запас 1.5. В однодвиг. отказе доступная ≈230 kN, все еще чуть выше потребной - значит, сможет держать высоту на 3 двигателях.
- Длина разбега от массы: если масса уменьшится на 20%, взлётная дистанция падает на ≈10%, а если увеличить на 20% (до 420 т), может выйти за 1000 м - то есть, поддержание массы < 350 т - важно, чтобы вписаться. Хорошо, мы держим 350.
- Градиент набора от высоты: на уровне моря с 4 двиг ∼30% (очень высокий), на 11 км он падает до ≈5%, что все равно выше нормативов (обычно мин ≈2%).
Figure 8: Climb gradient versus altitude, showing high margin near sea level and acceptable gradient near cruise.
Figure 9: Stall speed versus thrust-vectoring mode, indicating reduced Vs with increased TVC and an expected optimum near 35 degrees.
- Влияние ветра на посадку: можно сажать при 10 м/с попутного - но конечно, лучше против ветра. 10 м/с попутный увеличит дистанцию посадки до ≈1000 м (еще приемлемо). Боковой 13 м/с - не уронит, проверено по статике.
Figure 10: Landing distance versus longitudinal wind component, noting ≈10 m/s tailwind pushes distance toward 1000 m.

Figure 11: Wind component diagram (draft) illustrating decomposition used in landing-distance discussion.
В целом, лётные характеристики R4X соответствуют поставленной задаче: обеспечить STOL-возможности (взлёт, посадка ≈800 м) при сохранении реактивной крейсерской эффективности (M0.85, дальность ≈5000+ км). Успех этого подтверждения будет одним из критериев (раздел 4) - конкретно, если на испытаниях будет продемонстрирована посадка на ≈800 м при ветре ≤5 м/с и отрыв ≤800 м при стандартных условиях - мы достигли цели.
Заметим: результаты - предварительные, базируются на расчетных моделях. Требуется их верифицировать CFD, а впоследствии - лётными тестами, см. раздел 25-26.